engineermike
Well-Known Member
AI is already in use in dodge and GM pcm’s, though not for shift points AFAIK.Pretty soon there will be an AI using dynographs to tune cars optimal shift points etc.
Sponsored
AI is already in use in dodge and GM pcm’s, though not for shift points AFAIK.Pretty soon there will be an AI using dynographs to tune cars optimal shift points etc.
The problem with draggy g-force is the data is too noisy. We’re really splitting hairs here trying to determine shift points based on gain or loss of a couple of hp on the shift and draggy g’s just aren’t precise enough. They are accurate for what they do because the peaks and valleys average out to a good number in the timespan of the pull.Couldnt you just use a draggy to monitor g forces in each gear and shift when the g force of the current gear falls below the shift of the next gear?
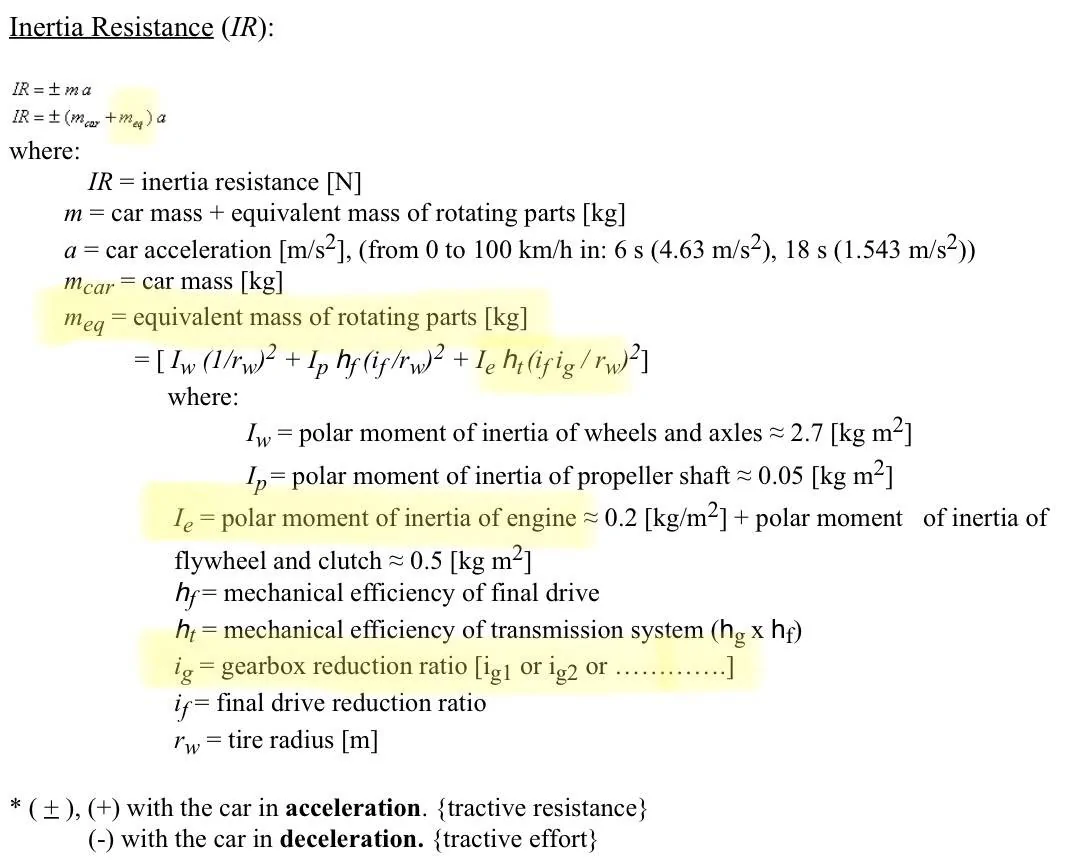
I’m definitely not mixing up friction and inertia. Since I’m not getting through anecdotally, let’s put pen to paper, shall we?
Let’s assume a stock 3.55 geared coyote does 0-35 mph in 2 seconds in 1st gear. This data came from a magazine test. In this timespan, we can assume the engine goes from about 1000 rpm to about 7500 rpm in the same 2 seconds. I don’t know the moment of inertia of the torque converter, flexplate, crankshaft, rod big-ends, damper, pulleys, sprockets, phasers, and camshafts, so I would propose simulating them using a 5” diameter cylinder weighing 100 lb, which I believe to be on the low side.
Moment of inertia I = 1/2 m r^2 = 312.5 lbm in in = 2.17 lbm ft ft
Torque = moment of inertia x angular acceleration
Torque = 2.17 lbm ft ft x (7500-1000)revs/min / 2 seconds x 2pi radians/rev / 60 seconds/min / (32.2 ft lbm / lbf / s / s)
Torque = 23 ftlb. So, it takes 23 ftlb of torque to accelerate just the rotating engine parts at a rate of 3250 rpm/second, and this torque does not make it to the rear wheels to be used to linearly accelerate the mass of the car.
At 7500 rpm, this is 33 hp.
In second gear, this power loss would drop to 22 hp because the 2 seconds becomes 3 seconds due to slower acceleration resulting from less mechanical advantage. In each gear going up this number reduces, not due to changes in mass or inertia, but rather due to the angular acceleration rate.
So you can see that the moment of inertia is identical but the power required to accelerate the engine changes as a function of engine speed rate of change, which decreases every gear change.
I’m definitely not mixing up friction and inertia. Since I’m not getting through anecdotally, let’s put pen to paper, shall we?
Let’s assume a stock 3.55 geared coyote does 0-35 mph in 2 seconds in 1st gear. This data came from a magazine test. In this timespan, we can assume the engine goes from about 1000 rpm to about 7500 rpm in the same 2 seconds. I don’t know the moment of inertia of the torque converter, flexplate, crankshaft, rod big-ends, damper, pulleys, sprockets, phasers, and camshafts, so I would propose simulating them using a 5” diameter cylinder weighing 100 lb, which I believe to be on the low side.
Moment of inertia I = 1/2 m r^2 = 312.5 lbm in in = 2.17 lbm ft ft
Torque = moment of inertia x angular acceleration
Torque = 2.17 lbm ft ft x (7500-1000)revs/min / 2 seconds x 2pi radians/rev / 60 seconds/min / (32.2 ft lbm / lbf / s / s)
Torque = 23 ftlb. So, it takes 23 ftlb of torque to accelerate just the rotating engine parts at a rate of 3250 rpm/second, and this torque does not make it to the rear wheels to be used to linearly accelerate the mass of the car.
At 7500 rpm, this is 33 hp.
In second gear, this power loss would drop to 22 hp because the 2 seconds becomes 3 seconds due to slower acceleration resulting from less mechanical advantage. In each gear going up this number reduces, not due to changes in mass or inertia, but rather due to the angular acceleration rate.
So you can see that the moment of inertia is identical but the power required to accelerate the engine changes as a function of engine speed rate of change, which decreases every gear change.
In the above video he is describing exactly what I was referring to in the first paragraph of my first post in this thread.The optimum shift point from a actual engineer;
I used the delta engine speed divided by dtime to simply calculate the average rate of change (angular acceleration), which turned out to be 3250 rpm/s. This is true (+/-10% since the engine torque isn’t constant) no matter how small the increment is, and can be used to calculate the torque required to achieve it.not just the start and final.
If you’re pulling calculus into this then you’re not understanding the basic principal I’m trying to get across.This is calculus and why Newton had to invent calculus for his laws to make sense and apply to rotating objects ….Or just do the integral.
This is taken out of context. The inertia of the internal parts does change when the engine rpm increases, and the rate of change of inertia is higher in lower gears.You have already agreed inertia is not changing, and that the mechanical advantage that's changing.
This is 100% false. It would be true if the engine’s rotating components had a moment of inertia of zero or if the engine speed was constant (cvt or brake dyno), but neither are true. See the video I posted above.The engines WOT flywheel power output, at any given RPM, is not changing with gear changes.
I posted the math earlier intentionally so that you could point out specifically which part you thought was incorrect.Do the math correctly,
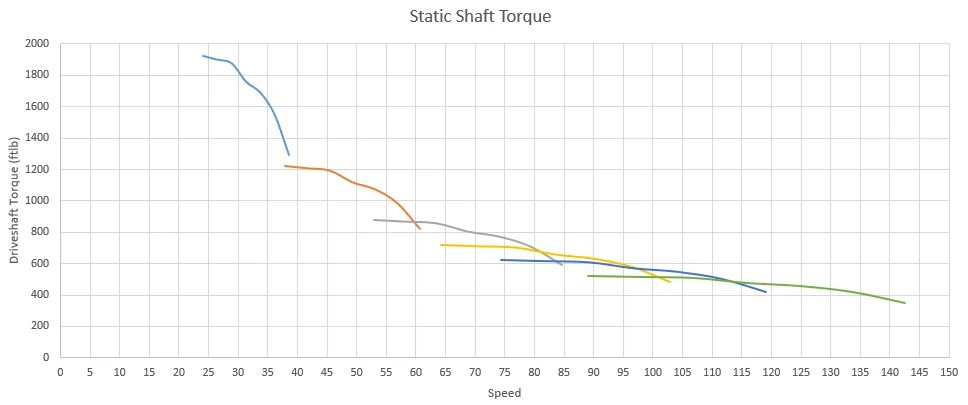
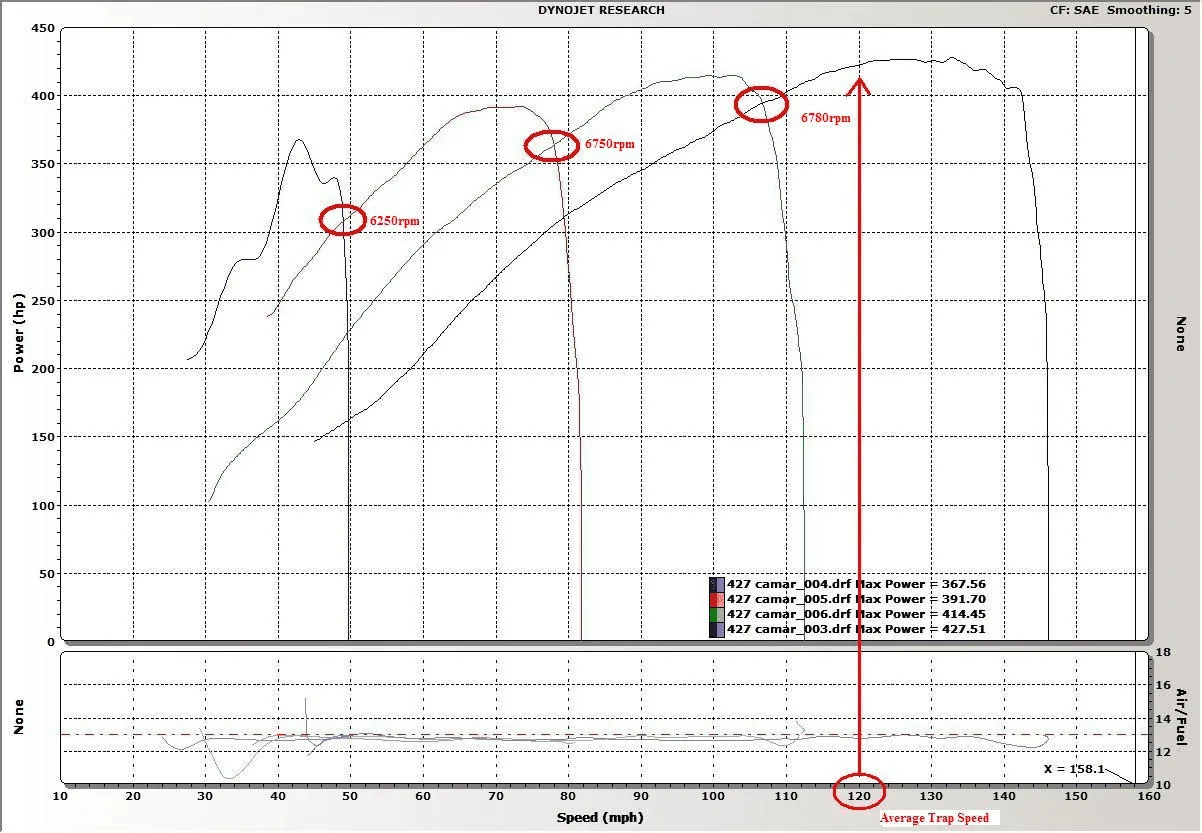
My dyno examples were posted in an attempt to demonstrate the differences between inertial and brake/steady state, because the reason they read differently speaks to the reason power to the ground is different in different gears.and understand dynos don't.
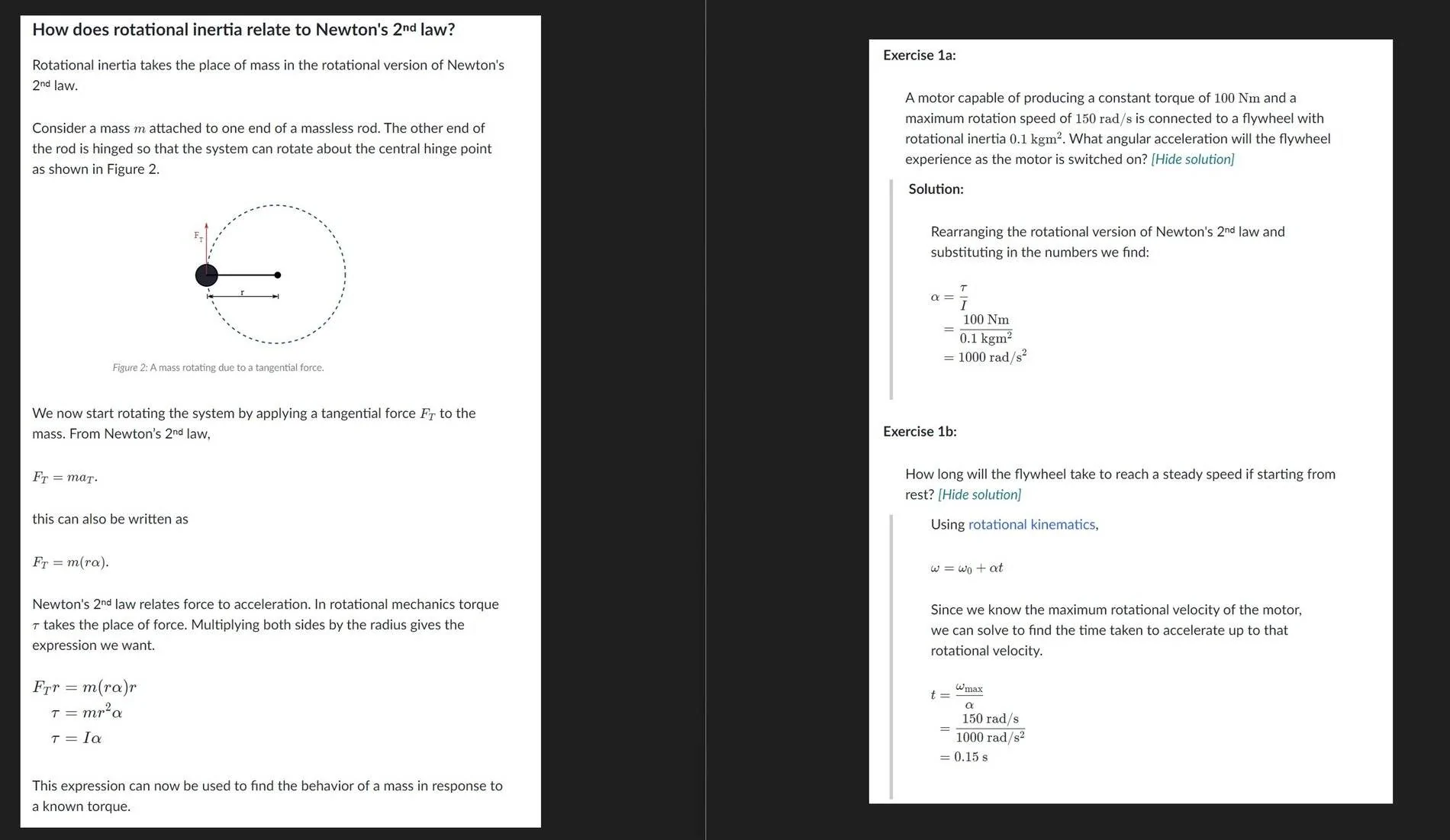
I don't disagree with any of the above. Moment of inertial does not change as a function of engine speed or angular acceleration. Angular momentum does change, however, because it is proportional to moment of inertia and angular velocity. And in order to impose a change in angular momentum, you must input torque (that can not also be used to linearly accelerate the car).Moment of inertia is the rotating masses resistance to acceleration.
It only changes if the mass changes or the radius the mass is rotating around changes. Increased RPMs of both the engine components or the drive train components change neither of those. The acceleration rate they have doesn't change those either.
If torque is 0 acceleration is 0 and vise versa.
But moment of inertia is a constant non varying amount at any moment in time and any given angular velocity.
I'm not sure I follow this logic path. T=I x a, so I = T/a. I'm arguing that, while I is constant, a is not zero in our case, so T is also not zero. a is easy to determine, and thus so it T. Therefore, it takes torque to accelerate rotating engine parts, which can not be used to accelerate the car linearly, and this affects lower gears more so than higher due to higher a.So if you did torque divided by acceleration to find moment of inertia, when they were both 0, you would assume moment of inertia was 0? Or if they were really small, close to zero, you would say the moment of inertia was really small?
Correct, except that the term "short shift" might misconstrue this to think I'm saying you should shift sub-5000 rpm. In almost every case I've applied the simple "maximize power" math to, the result is some unreasonably high rpm 1-2 shift. The OP's case shows the same. If you apply the debit due to power absorbed by angular momentum changes, suddenly the results become very reasonable. I'll explain graphically below.Just to be clear to make sure we are not off topic, you are arguing for short shift in lower gears, and i'm saying shift at redline.
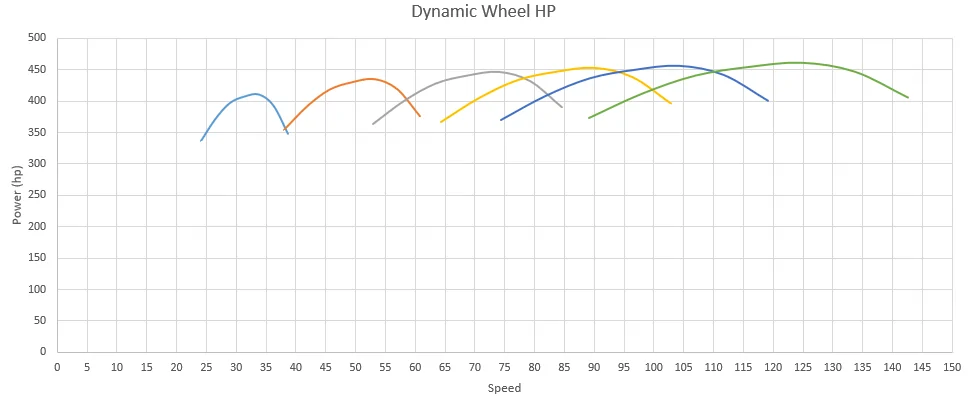
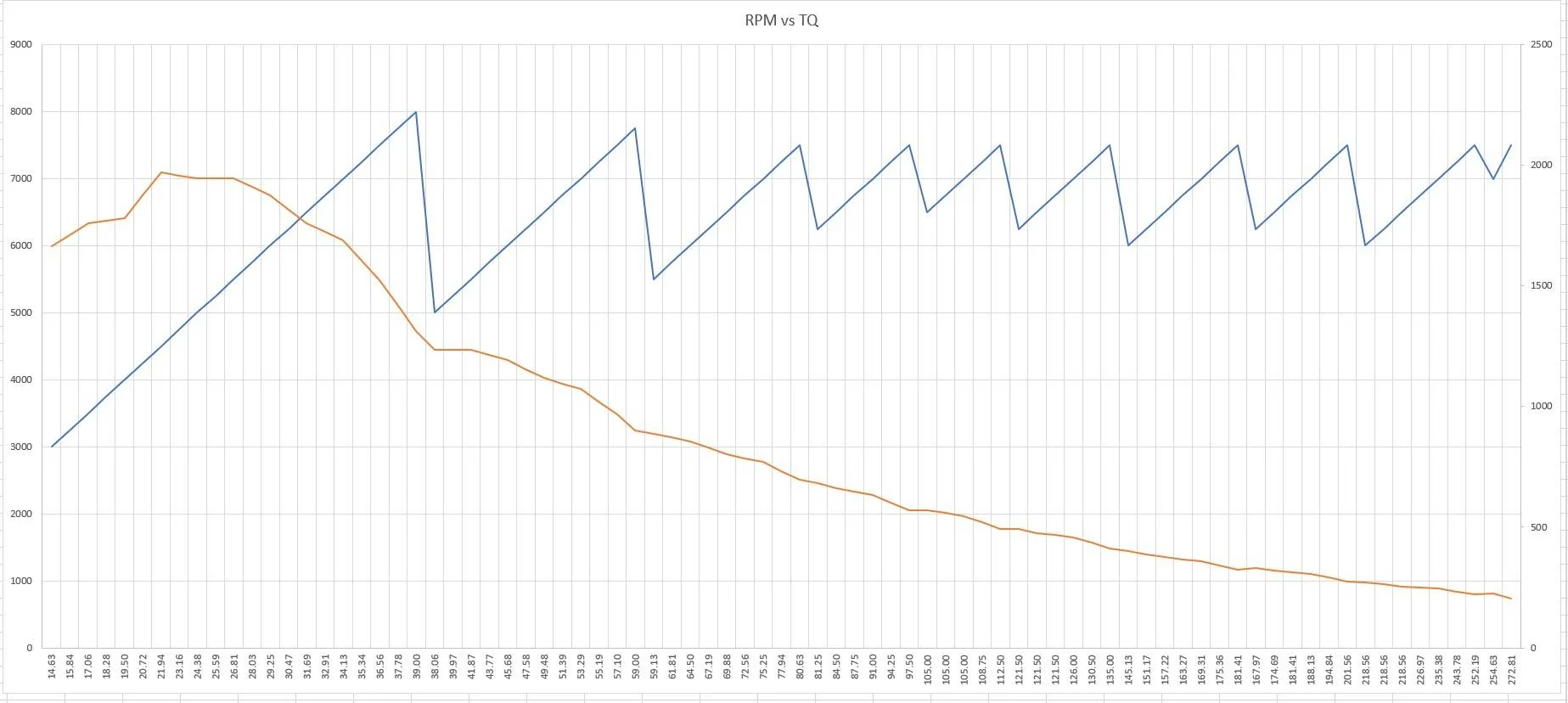
I went ahead and used your posted E85 torque curve to graphically demonstrate. The method you describe is the torque method, shown next. I used driveshaft torque.Taking torque x Gear ratio method and picking torque off my dyno graph, it suggests about 8100rpm 1-2, 7950 2-3 and that the rest of my shifts at 7550 are close enough.
Right for the same amount of torque it would accelerate slower. It would not have any effect on shift points. To rev that engine quicker it would require a larger amount of torque.Consider this for a minute - if you stored a 1000 lb pulley in the bed of your truck, the truck would accelerate at a certain rate. Now, take that 1000 lb pulley (assume the weight is situated along the edge and the diameter is large) and install it on the front of the crankshaft. Assume for a second that this is possible and doesn't break anything. Would the truck accelerate slower, the same, or faster? I think most would agree if the truck, if not a CVT, would accelerate slower because the massive increase in moment of inertia would hurt you more than it did when it was just laying in the bed. Does the engine make any less brake power? Nope. Does it make less inertial power? Definitely. Now think about how this might affect shift points. If it were CVT, it wouldn't affect the target rpm at all. However, the quicker you want the engine to rev, the worse it would hurt you. This would directionally push you towards shifting out of low gears sooner than you otherwise would. We can solve this and determine how much a more typical moment of inertia engine would be affected.
I agree with this method, but it should be engine RPM so you see where the next gear will start.I went ahead and used your posted E85 torque curve to graphically demonstrate. The method you describe is the torque method, shown next. I used driveshaft torque.

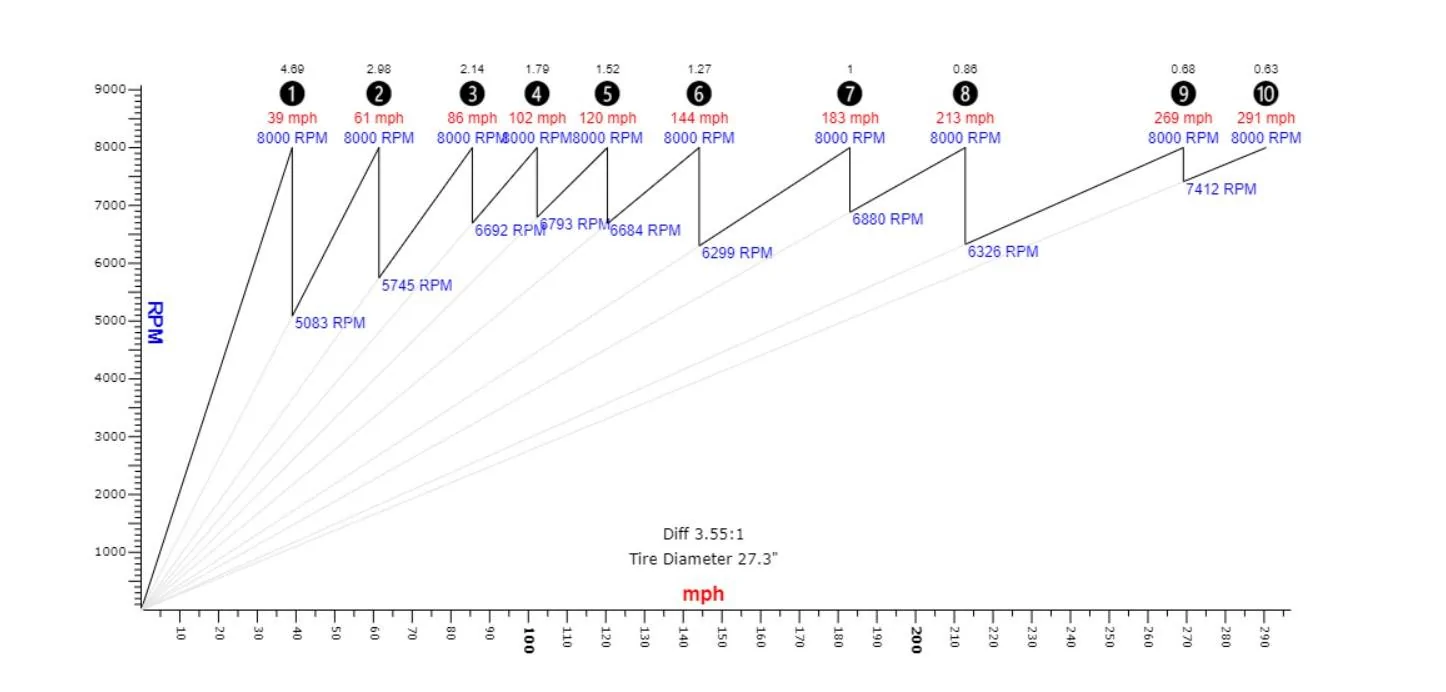
Obviously you would want maximum torque applied to the driveshaft. If you convert intersection speeds to engine rpm, you would find approximate shift points as follows:
1-2: 8100 rpm
2-3: 7800 rpm
3-4: 7650 rpm
4-5: 7600 rpm
5-6: 7500 rpm
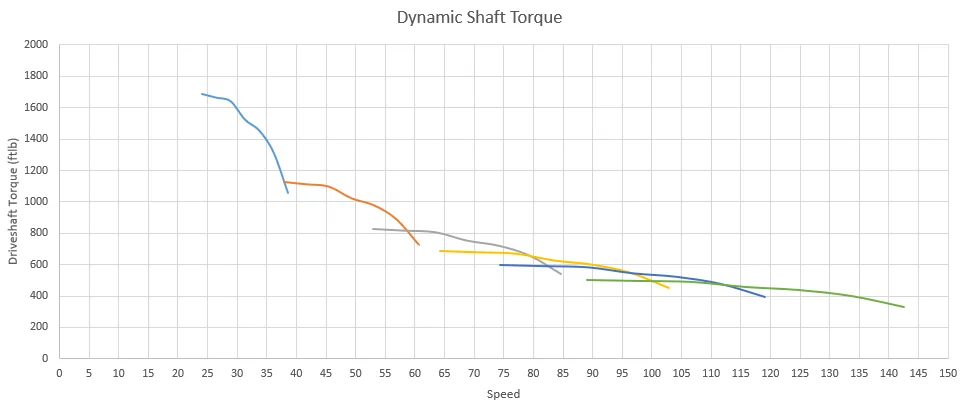
Inertia correction? The rest after this was made up from misunderstanding inertia and momentum.Now, if you apply the angular inertia correction as a function of engine speed rate of increase, the story changes a bit:
So you agree that adding moment of inertia to the crankshaft would slow the acceleration rate. Try to quantify the effect numerically, then. I have and I can't get around using angular acceleration, which is determined using the gear ratio at the time.Right for the same amount of torque it would accelerate slower. It would not have any effect on shift points. To rev that engine quicker it would require a larger amount of torque.
I never said torque falls with rpm due to moment of inertia.... torque is falling, ... I am saying it's not falling because of it's moment of inertia.
With a CVT, rpm is static, so it's a different case. You continue to represent the engine's power curve as though it's at constant speed, but ours is not....find your engines peak HP, and shift as to have the RPMs see the highest HP the engine makes. This will be the same for each gear. Just like it's the same for the infinite gear ratios in a CVT.
Again, the mass and radius of the rotating components do not change - I never said any different. But the angular inertia does change with rpm which requires torque input, and it's a function of rate of change, which is a function of the gear in use.Inertia correction? The rest after this was made up from misunderstanding inertia and momentum.
Inertia is a function of mass and rotating radius. Neither of which change, so there is no "correcting" for it.
You don't apply a "mass correction" to objects that are accelerating faster/ slower in a straight line. Why would you do it to a rotating object?