Brigadir
Well-Known Member
- Thread starter
- #1
Marry Christmas and Happy New Year comrades! Good news for poor racers like me ") now we can grab good quality logs, not much worse than out of more pricey brandy devices. In the best traditions, we don't buy - we DIY.
now we can grab good quality logs, not much worse than out of more pricey brandy devices. In the best traditions, we don't buy - we DIY.


The pictures above speak by themselves. I may add that the total cost is around $60 for this configuration (may be reduced if you choose cheaper modules). Soldering is pretty simple, and the best part - the firmware is free and open source.

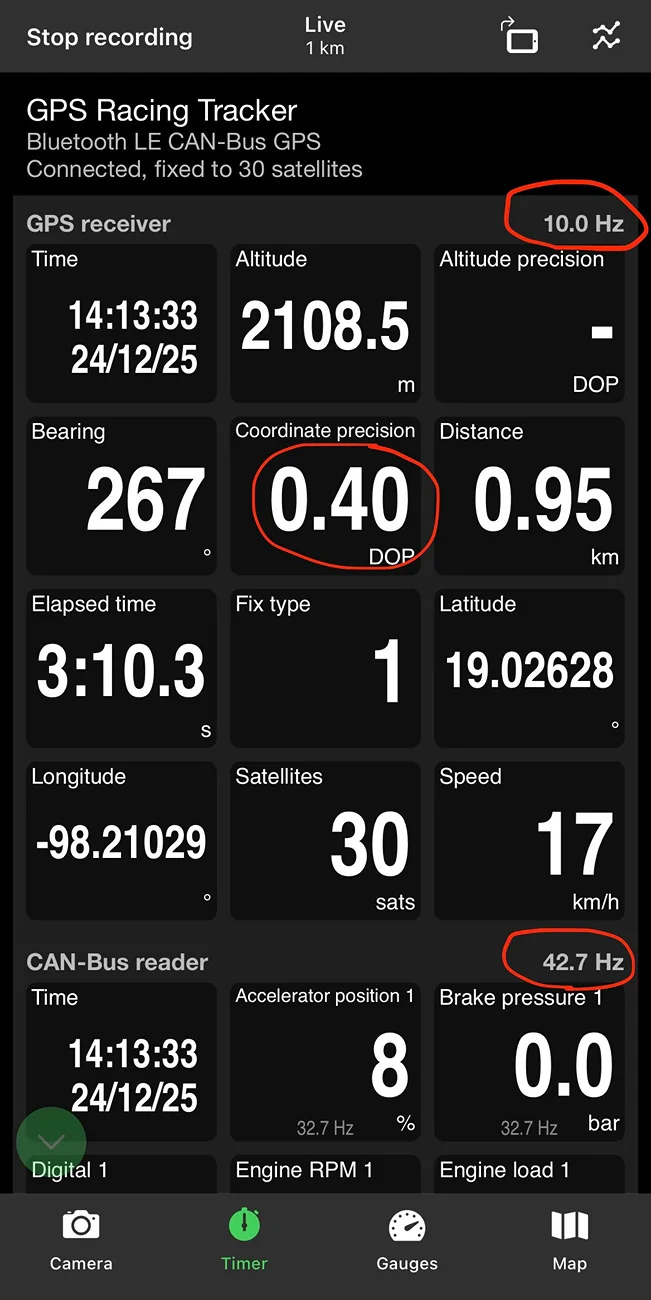
In result we get:
- 10Hz GPS data with 40cm HDOP
- raw CAN bus traffic with nonstandard OBDII PIDs, like steering angle or ATC activation
- so far, the firmware proved to work accurately, but you can modify sources up to your needs (ex. read temperatures, air flow, etc...)
- so far, the device connects to RaceChrono app because they provide public API. Though, integration with other client apps is in the Santa Clause list for 2026

I tried the device recently on a track and would like to share my amateur analysis. It would be the best way to describe it's utility.

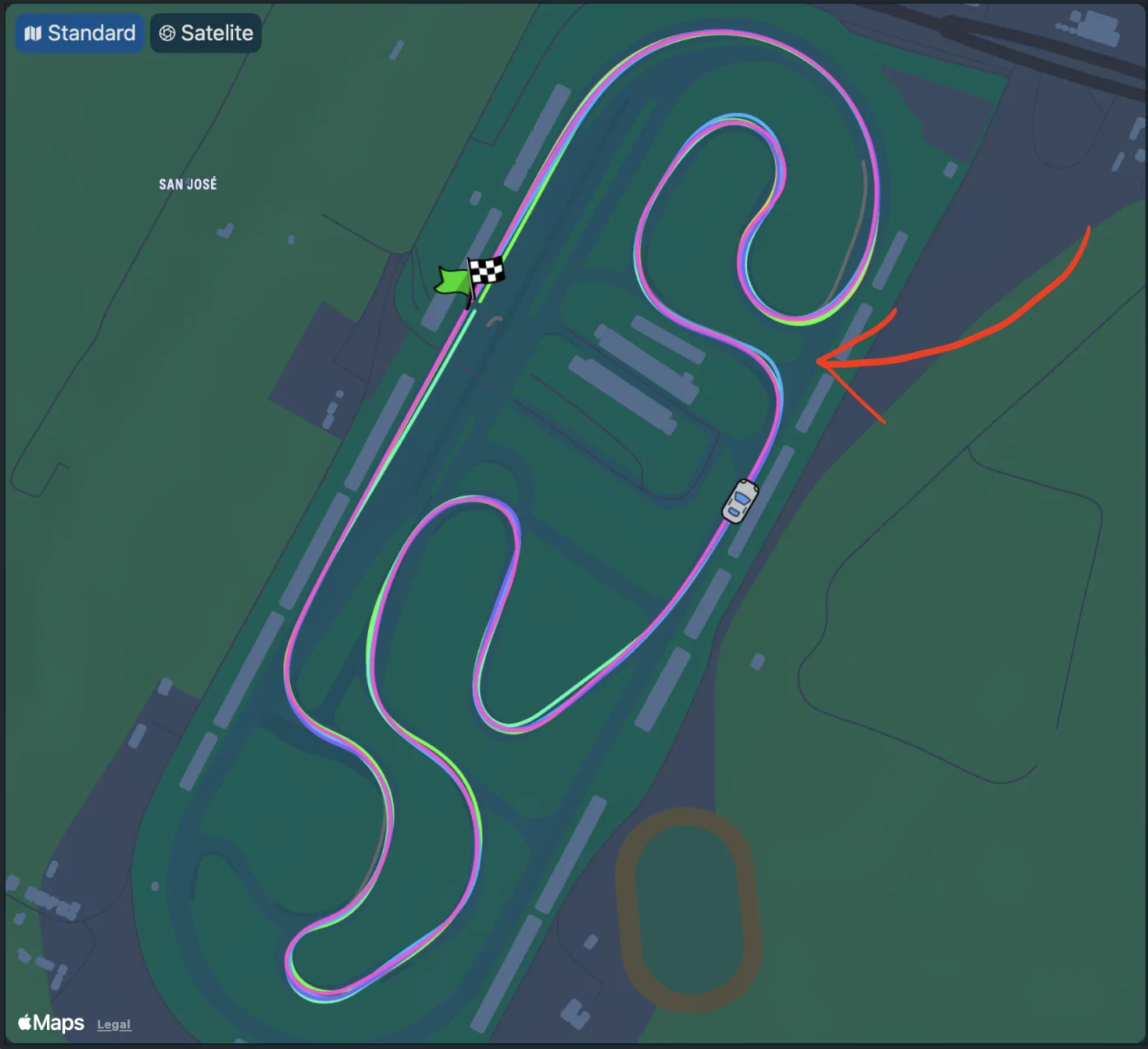
I was interested to see my mistake in this turn:

On the route, thanks to good GPS precision, we see that the car got out of the asphalt a little. From the first look (on the chart on screenshot) it's obvious that the entering speed was a little too high - 142 km/h vs. 139, 137 and 133 in other laps.
But what exactly caused the issue? To see it let's get the chart for braking and steering, which are grabbed from raw CAN traffic:
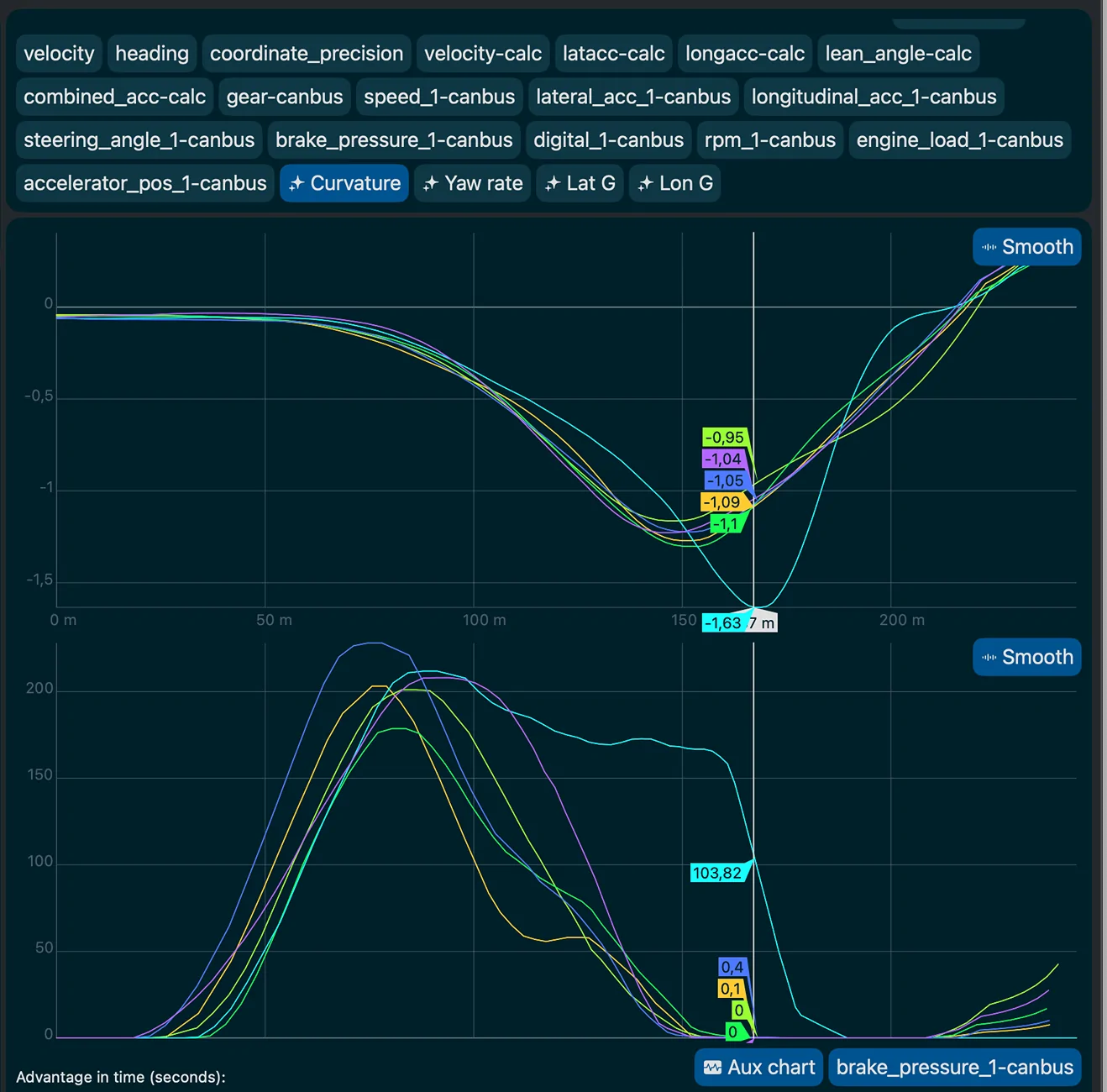
Now the picture is pretty clear - there was too much braking, so increasing steering angle didn't do any help. So, probably better option was to loosen brakes and try to rule out by steering.
Additional evidence for the issue is seen on the next charts where curvature (which means change of heading per distance) is plotted against steering angle and braking pressure. Looking at the problematic lap (blue) and others we see that more braking causes less curvature until the speed falls, and steering doesn't affect the curvature in this case:


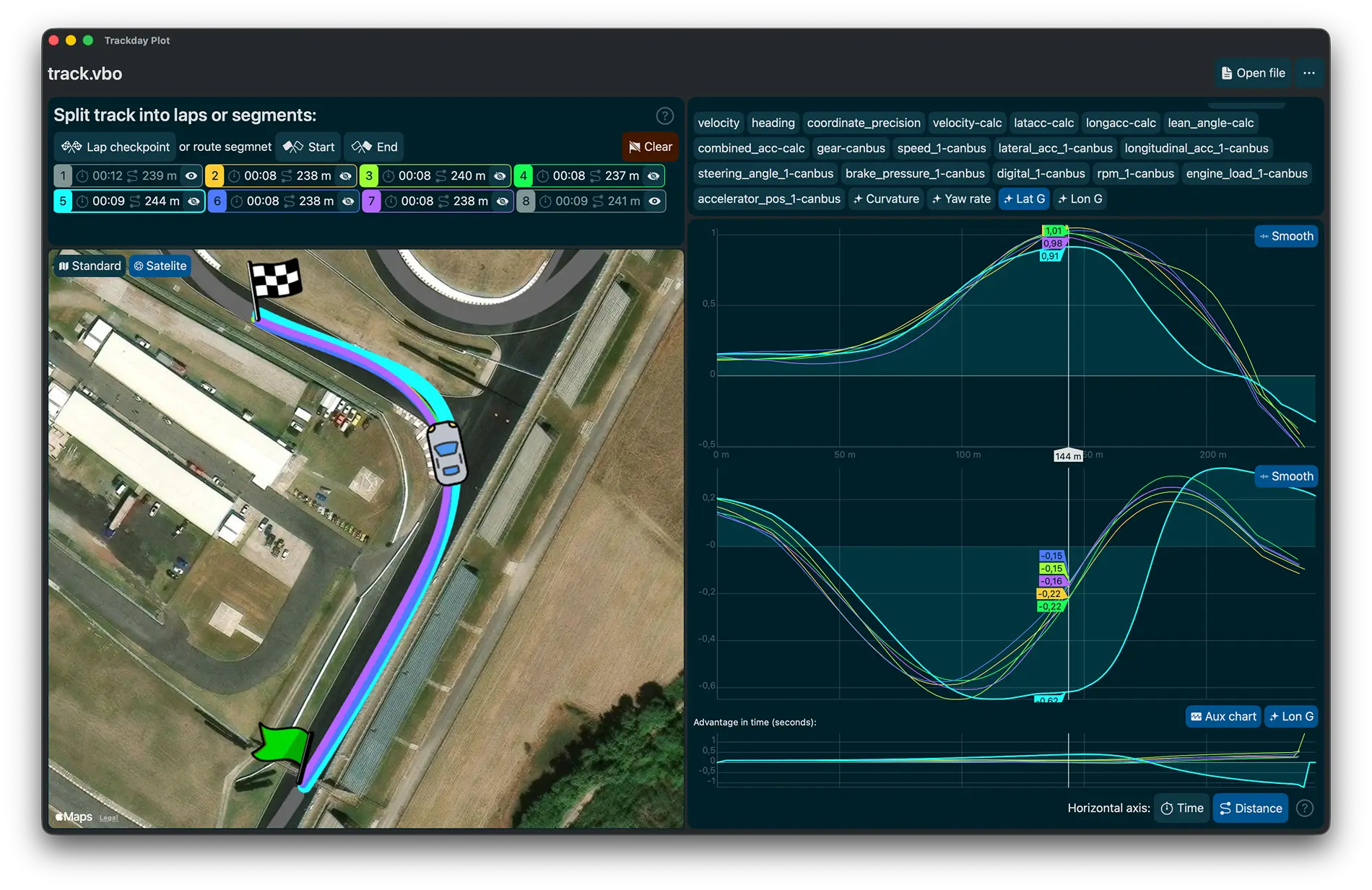
The chart of lat. and lon. G forces proves that the car was out of grip limit because of continuing lon. G, caused by braking:
That's it so far, very likely I'll develop more features in the device soon. Hope that it will be in good use and inspire other DIY'ers! Any kind of feedback is welcomed. And of course, I'll get better in turns on track
Almost forgot, the link: https://github.com/v-ivanyshyn/GPS-racing-tracker
now we can grab good quality logs, not much worse than out of more pricey brandy devices. In the best traditions, we don't buy - we DIY.

The pictures above speak by themselves. I may add that the total cost is around $60 for this configuration (may be reduced if you choose cheaper modules). Soldering is pretty simple, and the best part - the firmware is free and open source.

In result we get:
- 10Hz GPS data with 40cm HDOP
- raw CAN bus traffic with nonstandard OBDII PIDs, like steering angle or ATC activation
- so far, the firmware proved to work accurately, but you can modify sources up to your needs (ex. read temperatures, air flow, etc...)
- so far, the device connects to RaceChrono app because they provide public API. Though, integration with other client apps is in the Santa Clause list for 2026
I tried the device recently on a track and would like to share my amateur analysis. It would be the best way to describe it's utility.

I was interested to see my mistake in this turn:
On the route, thanks to good GPS precision, we see that the car got out of the asphalt a little. From the first look (on the chart on screenshot) it's obvious that the entering speed was a little too high - 142 km/h vs. 139, 137 and 133 in other laps.
But what exactly caused the issue? To see it let's get the chart for braking and steering, which are grabbed from raw CAN traffic:

Now the picture is pretty clear - there was too much braking, so increasing steering angle didn't do any help. So, probably better option was to loosen brakes and try to rule out by steering.
Additional evidence for the issue is seen on the next charts where curvature (which means change of heading per distance) is plotted against steering angle and braking pressure. Looking at the problematic lap (blue) and others we see that more braking causes less curvature until the speed falls, and steering doesn't affect the curvature in this case:

The chart of lat. and lon. G forces proves that the car was out of grip limit because of continuing lon. G, caused by braking:
That's it so far, very likely I'll develop more features in the device soon. Hope that it will be in good use and inspire other DIY'ers! Any kind of feedback is welcomed. And of course, I'll get better in turns on track
Almost forgot, the link: https://github.com/v-ivanyshyn/GPS-racing-tracker
Sponsored